Kovan Main Page
Introduction
Kovan is a smart robotics controller targeted at applications that require fully autonomous operation and high levels of integration. Kovan integrates onto a single PCB all the features you need to build a self-guided robot:
Actuator capability
- 4x 1.2A H-bridge motor drivers
- 4x servo drivers
Sensing capability
- 8x 10-bit analog inputs (5v/3.3v gang-selectable input range with individually programmable pull-ups)
- 8x digital I/O (5v/3.3v gang-selectable levels with individually programmable pull-ups)
- Rapid-prototyping headers (each I/O pin has adjacent +/- power rails so as to simplify sensor biasing)
- 3-axis accelerometer
Connectivity
- 802.11b/g wifi
- 2x USB 2.0 ports (suitable for video input via webcam)
- 2x 3.3V UART (one console, one expansion)
- IR rx & demodulator
- IR tx (modulation to be done in FPGA)
UI
- LCD + touchscreen connector (natively supports 3.5″ screen)
- Mono audio output
- Pushbutton and status LED indicators
- Optional digital video output driven by the FPGA (NeTV users might recognize the motif)
Processing
- Linux 2.6.34 running on 800 MHz Marvell ARM w/128 MB DDR2 + 2 GB microSD for firmware storage
- FPGA co-processor enabling hard real-time control extensions & advanced image processing extensions
Battery
- Integrated 2-cell Li-Ion battery charger (C=1.5A)
- Board runs for about 4 hours on a typical 1800mAh 2S1P Lipo RC pack (no motor load condition)
The native development environment for Kovan is based upon OpenEmbedded, the same system used by the Beaglebone. Kovan comes with C and Python support out of the box, so you can get started right away with development -- no need to set up cross-compilers.
A package consisting of the Kovan main board and battery emulator power supply, intended for intermediate and advanced developers who can roll their own battery and casing solution, is offered at Adafruit for $249.
This board is the heart of the 501(c)(3) non-profit KISS Institute for Practical Robotics' next-generation controller, valued at $400. KIPR's solution will come with a case, integrated battery, LCD, speaker, and an enhanced development environment suitable for entry level hobbyists and students; it will be available for purchase in January at the Botball store.
Hardware
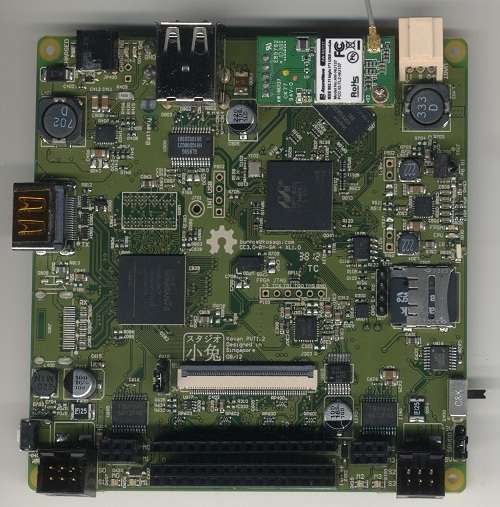
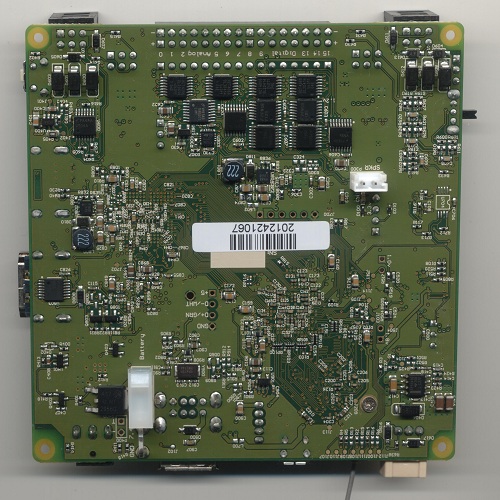
(hi-res top side hi-res bottom side)
{kind=link}
{kind=link}
Software
- Kovan firmware - Describes how to set up the build environment and create a firmware image from scratch
- link to pre-built firmware image that has gcc, python, etc. on it. Use this to replace the KIPR firmware if you want to do native development.
Tips & Tricks
The battery plug on kovan requires a Molex housing 0039013022 (Digikey WM1021-ND) with crimp terminals 0039000207 (Digikey WM3116CT-ND)
To use Kovan without a battery, plug a 7.5V power supply (such as Digikey 62-1169-ND) into the battery plug. Do not simultaneously plug power into the main power input, as this will cause the board to attempt to "charge" the emulating power supply.
FPGA
To reset and reprogram the fpga, do:
fpga-reset.py cat <yourbitfile.bit> > /dev/fpga
To replace the default FPGA configuration, replace the file
/lib/firmware/kovan-lx9.bit
with your bitfile. Note that this only replaces the post-boot configuration; there is also another copy in u-boot that should also be replaced using the command
config_util --cmd=putblock --block=LX9 < <yourbitfile.bit>
Setting up wifi
Setting up wifi on a kosagi-build requires configuring network manager. Please see networkmanager kovan wifi.